











QR kode

Produkter
Kontakt os

telefon

E-mail

Adresse
Nr. 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina

1 、 Projektoversigt
Denne plan sigter mod at tilpasse et robotuddannelsespraksis platformsystem til at imødekomme undervisningsbehovet på et universitetslaboratorium i maskinvision og kraftstyring. Systemet vil blive udviklet omkring AUBO-I5-samarbejdsroboten, Hikvision Industrial Camera, 3D-kamera og seks Axis Force Sensor for at opnå funktioner såsom robotkontrol, visuel inspektion og kraftstyringssamling og tilvejebringe open source øvre computersoftware til senere funktionel ekspansion.

2 、 Systemhardwaresammensætning
Robot: Vedtagelse af Aubo-I5-samarbejdsrobot har den egenskaberne ved høj præcision og høj sikkerhed og er velegnet til undervisningsscenarier.
Kamera: inklusive hikvision industrikamera og 3D -kamera, der bruges til at få billedoplysninger om arbejdsemner, der understøtter traditionel billedbehandling og dyb læringsdetektion.
Seks dimensionel kraftsensor: Kunwei (KWR75) eller andre mærker er valgt til realtidsovervågning af kraftinteraktionsinformation mellem robotens slutningseffektor og emnet.
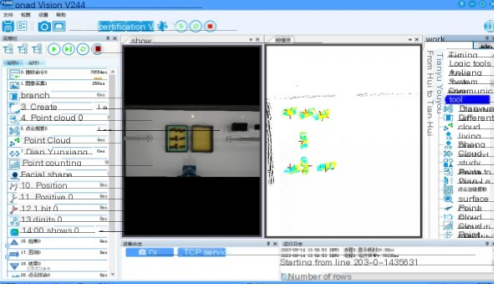
3 、 øvre computersoftware design
Grundlæggende funktioner:
Robotkontrol: Implementeringsfunktioner såsom forbindelse, afbrydelse, fælles eller holdningskontrol af robotter.
Kamerakontrol: Implementere funktioner såsom kameraforbindelse, afbrydelse og billedoptagelse.
Statusdisplay: Display til realtid af robotens led- og positionsstatus, statusparametre for den seks akse kraftsensor og billeder, der er optaget af kameraet.
Eksklusive funktioner:
Skafthulsenhed: Gennem driften af den øverste computer, kombineret med visuel inspektion og kraftstyringsteknologi, opnås den automatiske monteringsfunktion af skafthullet.
Interfacedesign: Den øverste computergrænseflade skal være kortfattet, klar og let at betjene. Grænsefladen skal indeholde grundlæggende funktionsknapper og et status displayområde samt give adgang til skafthulsenhedsfunktionen.
4 、 Funktionsimplementering
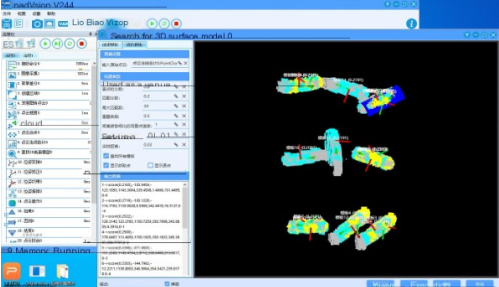
Maskinvision:
Traditionel billeddetektion: Brug af skabelon matchning, cirkelmontering, kantmontering og andre metoder til at lokalisere og genkende arbejdsemner, understøtte genkendelsen af stregkoder, QR -koder, karakternumre samt beregningen af gråskalaområde og plademængde.
Deep Learning Image Detection: Automatisk genkendelse og lokalisering af arbejdsemner gennem dybe læringsalgoritmer. Selvom dyb læring stadig kræver manuel annotation af billeder, vil vi stræbe efter at forbedre træningseffektiviteten og genkendelsesnøjagtigheden, hvilket gradvist reducerer annotering af annotering.
Strømstyringssamling:
Kombination af data fra seks dimensionelle kraftsensorer, opnå kraftinteraktionskontrol mellem robotens slutningseffektor og emnet og fuldstændig præcis samling af skafthullet.
5 、 Projektrisici og responsforanstaltninger
Risiko for samarbejde med seks Axis Force -sensorer: På grund af manglen på samarbejde med seks Axis Force -sensorer kan der være visse tekniske vanskeligheder og usikkerheder. Vi vil arrangere et professionelt teknisk team til at tackle problemet og sikre den glatte integration og stabile drift af sensorerne.
Risiko for dyb læringsdetektion: Deep Learning Image Detection kræver et vist niveau af genkendelsesnøjagtighed og effektivitet, mens man opfylder kravet om et kliktræning. Vi vil fortsætte med at optimere dybe indlæringsalgoritmer for at forbedre genkendelsesnøjagtighed og effektivitet, mens vi udforsker måder at implementere et kliktræning på.
6 、 Postudvidelse og sceneomskiftning
Den øverste computersoftware vedtager open source -design, der letter funktionel ekspansion og sceneskift efter behov i senere undervisning. For eksempel kan monteringsscenen med skafthuller skiftes til opgaver, såsom meshing af fine gear eller genkendelse og greb om andre arbejdsemner. Ved at ændre og fejlsøge open source-programmer er det let at opnå robotdrift og visuelle detektionsfunktioner i forskellige scenarier.
Denne plan integrerer hardware-ressourcer såsom robotter, kameraer og seks Axis Force-sensorer kombineret med open source øvre computersoftwaredesign for at give et funktionsrige og let udvidelige undervisningsmiljø til robotuddannelsespraksisplatformen. Gennem brug af praktiske platforme kan studerende få en dybere forståelse af principperne og anvendelsen af maskinvision og kraftstyringsteknologi og forbedre deres praktiske og innovative evner.
Nr. 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina
