")











QR kode

Produkter
Kontakt os

telefon

E-mail

Adresse
Nr. 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina

Med den stigende fremme af intelligent fremstillingsteknologi bliver penetrationen af automatiserede produktionslinjer i den magnetiske stålfremstillingsindustri mere og mere dybtgående. Imidlertid har den traditionelle manuelle belastnings- og losningstilstand, der har lav effektivitet, udsving i stor kvalitet og potentielle sikkerhedsrisici, gradvist vist en afbrydelse fra moderne højeffektiv produktionsbehov. Den innovative løsning ved anvendelse af Fuwei intelligente sammensatte robotter til belastning og losning af magnetisk stål sigter mod at fremme omdannelsen af magnetisk stålproduktion mod omfattende automatisering og intelligens ved at forbedre produktionseffektiviteten, reducere arbejdsomkostningerne og forbedre operationel sikkerhed. Denne plan repræsenterer ikke kun innovationen af produktionsteknologi, men praktiserer også aktivt visionen om fremtidige smarte fabrikker.
Industri smertepunkter:
1. høj afhængighed af manuel drift fører til lav produktionseffektivitet og ustabil kvalitet;
2. Der er sikkerhedsfarer under driftsprocessen, såsom ulykker som håndpinker og påvirkning;
3.. Dårligt arbejdsmiljø udgør en potentiel trussel mod operatørernes helbred;
4. Manuel drift er vanskelig at imødekomme de store og højeffektive produktionsbehov.
Oversigt over kundebehov og løsninger
Kundefterspørgsel: Kunden håber at opnå automatisk belastning og losning af magnetisk stål gennem Fuwei Intelligent Composite Robot, hvilket forbedrer produktionseffektiviteten og kvalitetsstabiliteten. De specifikke krav inkluderer gennemførelse af belastning og losning af to typer produkter med en cyklustid på ca. 80 sekunder for at afslutte indlæsningen af to stabler af produkter og have høje præcisionskrav.
Oversigt over løsning
Vi foreslår følgende renoveringsplan for at imødekomme vores kunders behov:
1. Udskift motor- og servokontrolleren for at forbedre robotens ydelse og stabilitet;
2. udstyret med radarnavigation, lette strimler og højttalere for at forbedre robotens autonome navigation, synlighed og interaktivitet;
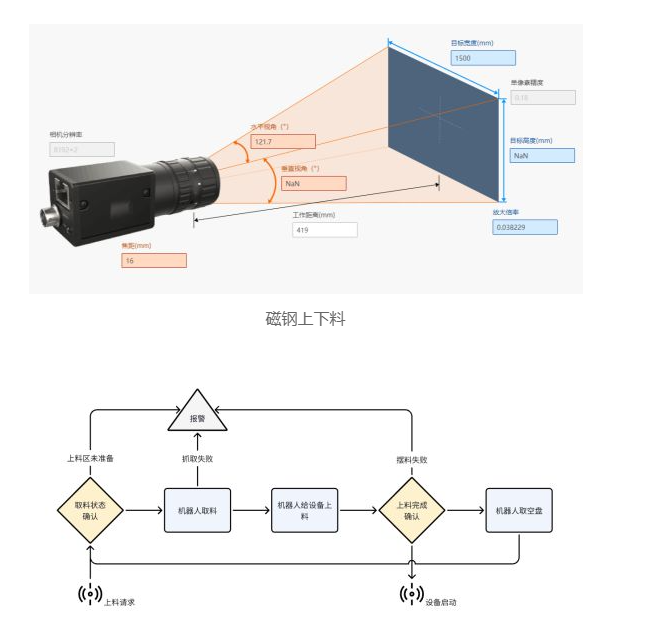
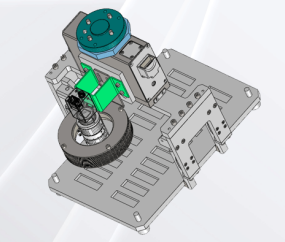
3. design tilpassede griber, der integrerer kameraer og sensorer for at opnå præcis identifikation og fat i magnetisk stål;
4. Optimer layout- og udstyrskonfigurationen af indlæsnings- og losningsområderne for at sikre, at robotterne nøjagtigt og effektivt kan afslutte deres arbejde.
4 、 detaljeret implementering af renoveringsplan
Sammensat robottransformation

Vælg motorer med højtydende og servokontrollere for at sikre nøjagtigheden og stabiliteten af robotbevægelse;
Udstyret med radarnavigation for at opnå autonom positionering og vejplanlægning af robotter;
Installer LED -lysstrimler og alarmhøjttalere for at forbedre robotens synlighed og interaktivitet;
Design tilpassede griber, der integrerer kameraer og sensorer for at opnå præcis identifikation og griping af magnetisk stål.
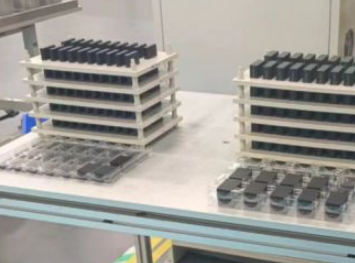
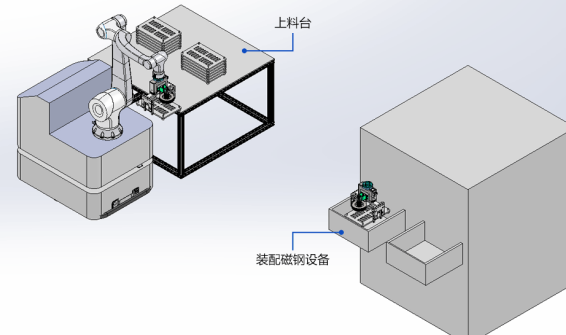
Optimering af belastningsområdet
Designpositioneringsguide slots til at guide magnetisk stål til udpegede positioner;
Opsæt desktop -positioneringsmarkører for at lette robotgenkendelse og placering af gribepunkter.
Renovering af losningsområdet
Indstil enhedspositioneringsmærket for at sikre, at roboten nøjagtigt placerer det magnetiske stål;
Installer elektriske kontrolpaneldøre og elektriske kontrolspalter for at beskytte operatører mod skade og opnå udstødning af automatiseret udstyr.
Udførelseslogik og procesoptimering
Udførelseslogikken for hele opløsningen er baseret på procesdesignet af automatiserede produktionslinjer, hvilket sikrer kontinuiteten og effektiviteten af arbejdsgangen. Hele processen udløses af en indlæsningsanmodning, og robotten udfører materielle hentningsoperationer baseret på, om belastningsområdet er klar. Under processen med at plukke og placere materialer opnås præcis genkendelse og kraftstyring gennem kameraer og sensorer integreret i griberen. Når magneten er placeret med succes på udstyret, vil roboten bekræfte færdiggørelsen af indlæsning og fortsætte til den næste cyklus.
Ved at bruge Fuwei Intelligent Composite Robot til magnetisk stålbelastning og losning, kan vi effektivt løse problemerne med traditionel manuel belastning og losningsmetoder, forbedre produktionseffektiviteten, reducere arbejdsomkostningerne og sikre operationel sikkerhed. På samme tid har denne løsning også høj skalerbarhed og fleksibilitet, som kan tilpasse sig magnetiske stålproduktionsvirksomheder i forskellige skalaer og produktionsbehov.
Nr. 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina
