











QR kode

Produkter
Kontakt os

telefon

E-mail

Adresse
Nr. 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina

I den moderne fremstillingsindustri, der forfølger effektivitet, præcision og automatisering, bliver anvendelsen af CNC -bearbejdningsteknologi stadig mere udbredt. Imidlertid bliver belastnings- og losningsprocessen for CNC -maskinværktøjer ofte en flaskehals, der begrænser produktionseffektiviteten. For at overvinde denne begrænsning har Fuweii Intelligent lanceret en sammensat robot CNC automatisk belastning og losning af løsning, omformning af produktionsprocessen og forbedring af produktionseffektivitet og fleksibilitet.
Projektoversigt
Dette projekt sigter mod at opnå automatisk belastning og losning af råvarer under CNC -bearbejdning samt nødvendige inspektions- og rengøringsprocesser. Ved at introducere et sammensat AGV (automatiseret guidet køretøj) robotarmsystem, kombineret med scanningskameraer og placering af visionkameraer, kan præcis og effektiv materialehåndtering og processtyring opnås.
Systemsammensætning
Composite AGV Robotic Arm System: Inkluderer nøglekomponenter såsom AGV -krop, robotarm, scanningskamera, placering af synskamera osv.
Kontrolsystem: Ansvarlig for at modtage opgavesignaler fra ② -områdets udstyrssystem, der kontrollerer AGV -robotarmsystemet for at gennemføre handlinger, såsom materiale, der griber fat i, håndtering og placering.
Scanningssystem: Ved at scanne QR -koden på materialebakken med et scanningskamera kan materielle oplysninger indtastes og spores.
Positioneringssystem: Brug af positionskameraer til positionering til at opnå præcis placering og navigation af AGV -robotarmsystemer.
Workflow
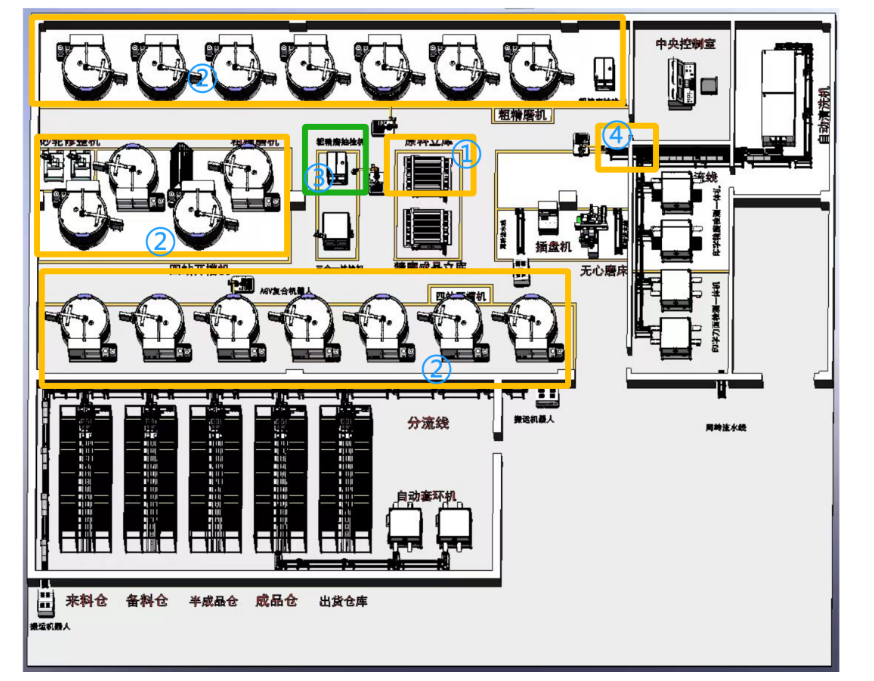
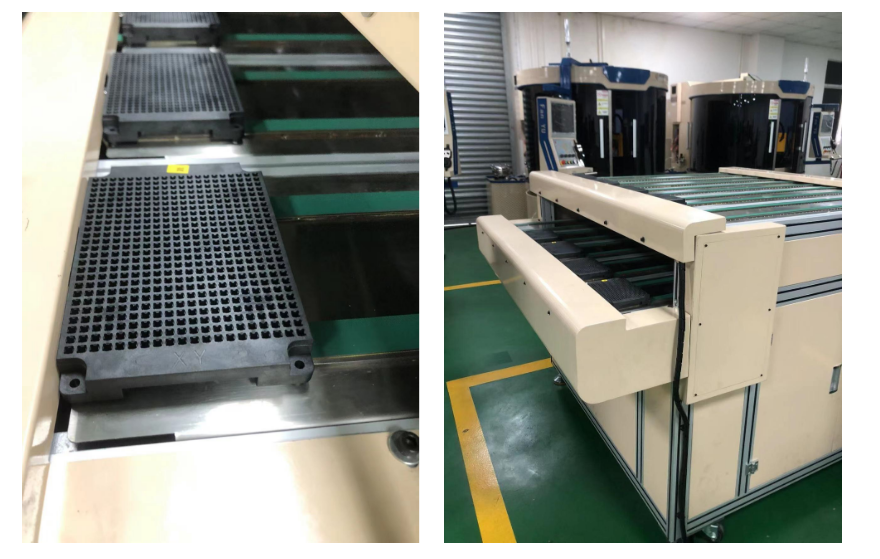
Råmateriale GRABBING: Det sammensatte AGV -robotarmsystem går til det første lag af råmaterialeopbevaring for at få fat i de materialer, der skal behandles i henhold til kontrolsysteminstruktionerne.
Behandlingsprocedure: Lever de indfangede materialer til maskinen i området ②, placer dem i henhold til maskinens interne placeringsposition, og vent til behandling.
Testproces (valgfrit): Hvis systemet udsteder en testanmodning, skal du sende formdisken fra maskinens testposition i område ② til placeringsområdet for testudstyr i område ③ til test. Når inspektionen er afsluttet, skal du sende formskiven tilbage til maskinen i området ②.
Rengøringsproces: Placer materialerne, der er behandlet af udstyret i område ② på transportelinjen for rengøringsmaskinen i område ④, og det materielle rengøringsarbejde afsluttes automatisk af transportelinjen.
Teknisk implementering
Composite AGV Robotic Arm System: Vedtagelse af avanceret AGV -teknologi og robotarmteknologi for at opnå effektiv og præcis materialehåndtering.
Scanningssystem: Brug af højtydende scanningskameraer for at sikre nøjagtig input og sporing af materialeinformation.
Positioneringssystem: Brug af avanceret visuel positioneringsteknologi til at opnå præcis placering og navigation af AGV -robotarmsystemer.
Kontrolsystem: Vedtagelse af et pålideligt kontrolsystem for at sikre den stabile drift og det effektive samarbejde mellem hele systemet.
Systemfordele
Høj grad af automatisering: Realisering af automatisk belastning og losning, detektion og rengøring af råvarer i CNC -bearbejdningsproces, forbedring af produktionseffektiviteten.
Høj præcision: Ved at bruge scanningskameraer og placering af visuelle kameraer kan der opnås nøjagtigt input og præcis placering af materialeinformation.
Stærk fleksibilitet: Arbejdsgangen kan justeres fleksibelt i henhold til faktiske behov for at imødekomme forskellige produktionskrav.
Stærk sporbarhed: Ved at bruge et scanningssystem til at spore og spore materialeinformation gennem hele processen kan niveauet for produktkvalitetsstyring forbedres.
Nr. 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina
