
")










QR kode

Produkter
Kontakt os

telefon

E-mail

Adresse
Nr. 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina

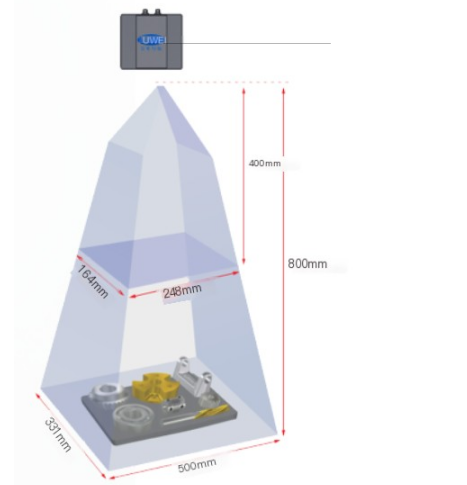
I den automatiserede samlebånd til behandling af aluminiumslegering af metalplader påvirker placeringsnøjagtigheden af feederen direkte produktets endelige kvalitet og produktionseffektivitet. Hvordan man sikrer, at feederen nøjagtigt kan placere emnet i den udpegede position på en travl produktionslinje er blevet en stor udfordring, vi står overfor. I dag afslører vi vores 3D -visuelle vejledningsopløsning, som sikrer placeringsnøjagtigheden af feederen når ± 2 mm med et synsfelt på 1500 mm og en kameras opløsning på 20 millioner.

1 、 Høj præcision 3D Vision System
For det første vedtager vores løsning et højpræcisions 3D-synssystem. Dette system bruger højhastighedskameraer og avancerede billedbehandlingsalgoritmer til at fange realtidsarbejdsoplysninger på produktionslinjen og udføre 3D-rekonstruktion. Inden for et synsfelt på 1500 mm er vores system i stand til klart at identificere enhver detalje i emnet, hvilket giver præcis datastøtte til efterfølgende placering.
2 、 Intelligent algoritmeoptimering
At stole udelukkende på visuelle systemer med høj præcision er imidlertid ikke nok. For at sikre, at materialets placeringsnøjagtighed når ± 2 mm, er vi også nødt til at optimere algoritmen. Vores F & U -team har foretaget præcise justeringer og optimeringer til forskellige aspekter, såsom visuel genkendelse, stiplanlægning og robotkontrol gennem omfattende eksperimenter og dataanalyse.
Med hensyn til visuel genkendelse har vi vedtaget avanceret funktionsekstraktion og matchende algoritmer, som nøjagtigt kan identificere stillingen og holdningen af emnet. Med hensyn til stiplanlægning overvejer vi forskellige faktorer, såsom robotens bevægelsesbane, formen og størrelsen på emnet osv. For at sikre, at robotten kan placeres langs den optimale sti. Med hensyn til robotkontrol bruger vi servomotorer og controllere med høj præcision for at sikre, at roboten kan bevæge sig i henhold til den forudindstillede sti og hastighed.
3 、 Feedback og justering i realtid
Derudover har vores system også evnen til at give realtid feedback og tilpasning. Under processen med robotplacering overvåger vores system kontinuerligt placeringen og holdningen af emnet i realtid og feeds tilbage overvågningsresultaterne til kontrolsystemet. Hvis der er en afvigelse mellem den faktiske placeringsposition og den forudindstillede position, vil kontrolsystemet straks finjustere roboten for at sikre, at den endelige placeringsnøjagtighed når ± 2 mm.
Gennem vores 3D -visuelle vejledningsopløsning har vi med succes forbedret nøjagtigheden af foderplacering i flere aluminiumslegeringsanlægsgange. I praktiske anvendelser forbedrer vores system ikke kun produktionseffektiviteten, men reducerer også defektfrekvensen, hvilket bringer konkrete økonomiske fordele til virksomheden.
Sammenfattende har vores 3D-visuelle vejledningsopløsning med succes forbedret placeringsnøjagtigheden af feederen i aluminiumslegeringsbearbejdning gennem højpræcisions visuelle systemer, intelligent algoritmeoptimering og realtids feedback og justering. I fremtiden vil vi fortsætte med at optimere og forbedre vores løsninger og bringe mere effektive og nøjagtige automatiserede behandlingsløsninger til flere virksomheder.
Nr. 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina
