











QR kode

Produkter
Kontakt os

telefon

E-mail

Adresse
Nr. 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina

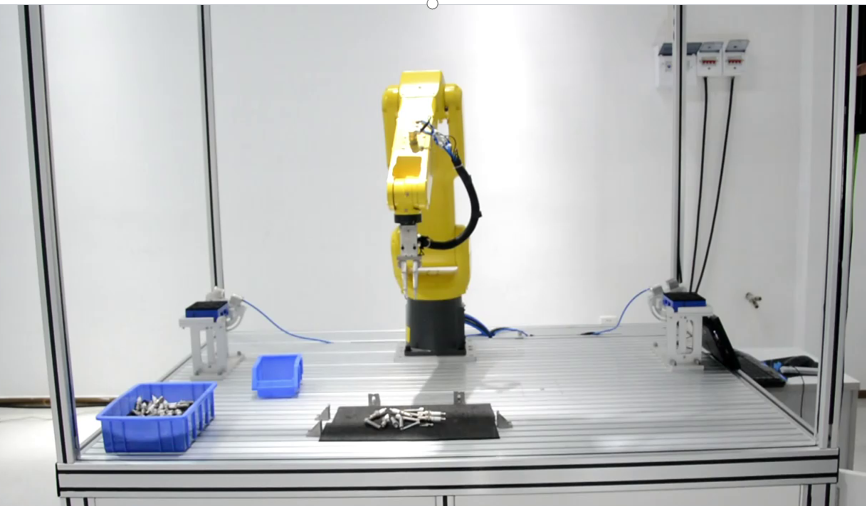
Med den kontinuerlige forbedring af fremstillingsautomation har en stor Automotive Parts Enterprise foreslået behovet for at bruge sammensatte robotter til at gennemføre boltsortering for at forbedre produktionseffektiviteten og reducere arbejdsomkostningerne. Fuwei Intelligent bruger sammensatte robotter kombineret med 3D-industrikameraer og højtydende controllere til at opnå automatisk bolt, der greb og derved forbedre den samlede driftseffektivitet af produktionslinjen.
Projektvanskeligheder
1. Krav med høj præcision: Bolte er små komponenter, der kræver, at robotter nøjagtigt identificerer og stabilt forstå, hvilket undgår produktskade eller produktionslinje -nedetid.
2. robotter er nødt til at tilpasse sig dynamiske faktorer, såsom forskellige hyldepositioner og ændringer i gripende punkter.
3. Mens man sikrer nøjagtigheden af ingredienser, er det nødvendigt at optimere robotoperationsprocessen og forbedre den samlede operationelle effektivitet.

Løsning
Ved at bruge 3D-industrikameraer og højtydende controllere kan robotter nøjagtigt lokalisere boltkomponenter og justere grebsstrategier i realtid gennem visuel genkendelse, hvilket sikrer stabilitet og nøjagtighed.
Fuwei Intelligent Integrated Controller indsamler værkstedssignaler for at opnå problemfri integration mellem robotter og produktionslinjer. Multiakse samtidig kontrol, fleksibel justering af bane i henhold til ændringer i materialestativet og gripende punkter, tilpasning til dynamiske miljøer.
Optimer hjemmearbejdsprocessen, reducer ventetiden og forbedring af grebseffektivitet. Indstil en rimelig hjemmearbejdscyklustid, og juster mængden af at gribe og samle i henhold til efterspørgslen for at imødekomme de faktiske behov på produktionslinjen.
Handlingsproces:
Efter at have modtaget den materielle grebsanmodning, begynder den sammensatte robot at flytte til den udpegede produktposition. Dernæst udfører roboten visuel positionering for at sikre nøjagtig genkendelse og fat i produktet. Under positioneringsprocessen, hvis systemet registrerer, at antallet af produkter er mindre end den indstillede værdi, vil det udløse en alarm og forsøge at flytte. Hvis positioneringen er vellykket, vil roboten fortsætte med at udføre grebsoperationer; Hvis positioneringen mislykkes, flytter den til placeringen af det næste produkt og prøver igen. Efter vellykket greb flytter roboten produktet til losningsområdet for at afslutte losningsoperationen. Gennem hele processen er visuel positionering og greb nøgletrin, hvilket sikrer, at robotten effektivt og nøjagtigt kan fuldføre belastnings- og losningsopgaverne.
Tekniske fordele:
Kan tilpasse sig drastiske ændringer i miljømæssig belysning og erstatte manuel arbejdskraft;
Intelligent robotarmhindring undgåelse og baneplanlægningsalgoritme baseret på dyb læring til objektdetektion og lokalisering;
Kan tilpasse sig scenarier, hvor flere arbejdsemner produceres samtidigt.
Kerneværdier:
Reducer omkostningerne og øg effektiviteten, forbedrer stabiliteten, sættes hurtigt i produktion med enkel drift og tilpasser sig hurtigt til nye produkter.
Denne plan vil forbedre produktionslinjen operationel effektivitet. I mellemtiden kan risikoen for produktskade og produktionslinje -nedetid gennem præcis placering og grebsteknologi reduceres, hvilket forbedrer produktkvaliteten og produktionsstabiliteten. Derudover vil tilpasningsevnen til dynamiske miljøer og effektiv tempo -kontrol yderligere forbedre produktionslinjen fleksibilitet og responshastighed og imødekomme de konstant skiftende produktionsbehov for GAC Toyota.
Nr. 22, Hongyuan Road, Guangzhou, Guangdong -provinsen, Kina
